Researchers in Italy have successfully completed the first flight of iRonCub3. The robot lifted off the ground by about 50 cm and remained stable throughout the flight. A research paper detailing the achievement was published today in <span class="glossaryLink" aria-describedby="tt" data-cmtooltip="
” data-gt-translate-attributes=”[{"attribute":"data-cmtooltip", "format":"html"}]” tabindex=”0″ role=”link”>Nature Communications Engineering.
The Italian Institute of Technology (IIT) has achieved a major breakthrough in humanoid robotics by completing the first successful flight of iRonCub3, the world’s first jet-powered flying humanoid robot built for real-world environments. The research team analyzed the robot’s complex aerodynamics and created an advanced control system for managing its interconnected parts.
The entire development process, including live flight testing, took about two years. In recent experiments, the robot lifted approximately 50 cm off the ground while maintaining stability. This success marks a step forward in building flying robots that can function in challenging settings while preserving a human-like form.
Details of the aerodynamic and control work have been published in Nature Communications Engineering, an open-access journal from the Nature Portfolio. The research was conducted by IIT roboticists in Genoa, Italy, in collaboration with Alex Zanotti’s team at the DAER Aerodynamics Laboratory at the Polytechnic of Milan, where extensive wind tunnel tests were performed, and Gianluca Iaccarino’s group at Stanford University, where deep learning algorithms were developed to model aerodynamics.
This flight demonstration is the latest milestone from the Artificial and Mechanical Intelligence (AMI) Lab at IIT, led by Daniele Pucci. Their work aims to expand the capabilities of multi-modal humanoid robots by integrating walking and flying functions, with the goal of enabling robots to navigate unstructured and extreme environments.
Design and hardware innovations
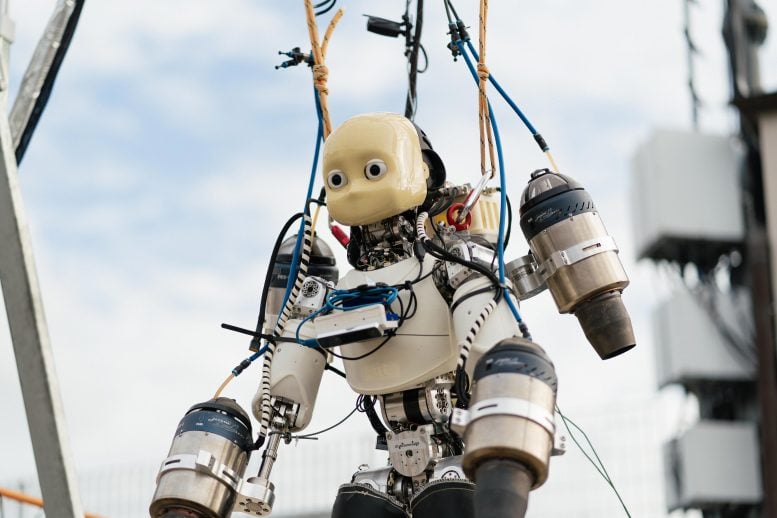
iRonCub3 represents the next step in the development of earlier prototypes and is built on the latest version of the iCub humanoid robot, known as iCub3, which was designed for remote operation. The robot features four jet engines—two mounted on its arms and two on a jetpack attached to its back. To support these engines, the iCub hardware was modified with a new titanium spine and protective heat-resistant covers.
With the jet engines installed, the robot weighs around 70 kilograms. The turbines can generate a maximum thrust of over 1000 newtons. This setup allows the robot to hover and carry out controlled flight maneuvers, even when faced with wind disturbances or uncertain environmental conditions. The exhaust temperature from the engines can reach up to 800 degrees <span class="glossaryLink" aria-describedby="tt" data-cmtooltip="
” data-gt-translate-attributes=”[{"attribute":"data-cmtooltip", "format":"html"}]” tabindex=”0″ role=”link”>Celsius.
[embedded content]
Researchers in Italy at Italian Institute of Technology achieved a first flight of iRonCub3. The robot was able to lift off the floor by approximately 50 cm while maintaining its stability. The result has been possible thanks to thermodynamics and aerodynamics studies, combined with robotics and AI-powered control systems. Credit: IIT-Istituto Italiano di Tecnologia
“This research is radically different from traditional humanoid robotics and forced us to make a substantial leap forward with respect to the state of the art,” explains Daniele Pucci. “Here, thermodynamics plays a pivotal role — the emission gases from the turbines reach 700°C temperature and flow at nearly the speed of sound. Aerodynamics must be evaluated in real-time, while control systems must handle both slow joint actuators and fast jet turbines. Testing these robots is as fascinating as it is dangerous and there is no room for improvisation.”
The AMI research team concentrated on the robot’s dynamic balance, which is especially challenging due to its humanoid shape. Unlike traditional drones that have compact and symmetrical structures, iRonCub3 has an elongated form with weight distributed across movable limbs and a shifting center of mass. This complexity required the development of advanced flight balance models that take into account the robot’s multibody dynamics and the interaction between jet propulsion and limb movement. Additionally, the moving limbs greatly complicate the robot’s aerodynamics, as each motion changes how air flows around the body.
AI and aerodynamic modeling
The researchers at IIT have performed extensive wind tunnel experiments, advanced Computational Fluid Dynamics (CFD) simulations and developed AI-based models capable of estimating aerodynamic forces in real time.
“Our models include neural networks trained on simulated and experimental data and are integrated into the robot’s control architecture to guarantee stable flight” explains Antonello Paolino, first author of the paper and PhD student in a joint program between the IIT and Naples University, who spent a semester as visiting researcher at Stanford University.
As a result, iRonCub3 is equipped with AI-powered control systems that allow it to fly while handling high-speed turbulent airflows, extreme temperatures, and the complex dynamics of multi-body systems.
The advanced aerodynamic modeling developed by IIT demonstrates that it is possible to maintain posture and stability even during non-stationary maneuvers, such as sequential engine ignition or changes in body geometry.
These studies can be transferred to other robots with unconventional morphologies, representing a unique case compared to classical drones, whose balance relies on symmetry and simplified control strategies that often neglect the robot’s own aerodynamics and thermodynamics.
Co-design and integrated systems
The final design of iRonCub3 is the result of an advanced co-design process, specifically developed to integrate <span class="glossaryLink" aria-describedby="tt" data-cmtooltip="
” data-gt-translate-attributes=”[{"attribute":"data-cmtooltip", "format":"html"}]” tabindex=”0″ role=”link”>artificial intelligence and multi-physics into the design of flying robots. These techniques, which are innovative in the field of robotics, allow for the simultaneous optimization of both body shape and control strategies, considering the complex interactions between aerodynamics, thermodynamics, and multibody dynamics.
Co-design was used to determine the optimal placement of the jet turbines to maximize control and stability during flight. Advanced design techniques were also employed to manage the heat dissipation generated by the engines, thus ensuring the structural integrity of the robot even under extreme operating conditions.
The robot has been completely re-engineered to withstand the harsh conditions associated with aerial locomotion, introducing major improvements focused on precision actuation, enhanced thrust control via integrated sensors, and advanced planners for coordinated takeoff and landing.
Throughout the design process, numerous iterative adjustments were made based on the results of advanced simulations and experimental testing, leading to the robot’s current configuration. This approach has allowed the team to overcome the limitations of traditional methodologies and represents a step forward in the automatic and integrated design of complex robotic systems.
Future testing and applications
The first flight tests of iRonCub3 have been conducted in IIT’s small flight-testing area, where the robot was able to lift off the floor by approximately 50 cm. In the coming months, prototype testing will continue and will be further enhanced thanks to a collaboration with Genoa Airport (Aeroporto di Genova), which will provide a dedicated area that will be set up and equipped by the Italian Institute of Technology in compliance with all required safety regulations. The area will host future experimental campaigns.
Applications of flying humanoid robots like iRonCub3 are envisioned in a variety of future scenarios, such as search-and-rescue operations in disaster-struck areas, inspection of hazardous or inaccessible environments, and exploration missions where both manipulation capabilities and aerial mobility are essential.
Reference: “Learning aerodynamics for the control of flying humanoid robots” by Antonello Paolino, Gabriele Nava, Fabio Di Natale, Fabio Bergonti, Punith Reddy Vanteddu, Donato Grassi, Luca Riccobene, Alex Zanotti, Renato Tognaccini, Gianluca Iaccarino and Daniele Pucci, 18 June 2025, Communications Engineering.
DOI: 10.1038/s44172-025-00447-w
Never miss a breakthrough: Join the SciTechDaily newsletter.