
Engineers at the University of Wisconsin–Madison have pinpointed a surprising flaw in how <span class="glossaryLink" aria-describedby="tt" data-cmtooltip="
” data-gt-translate-attributes=”[{"attribute":"data-cmtooltip", "format":"html"}]” tabindex=”0″ role=”link”>NASA tests its rovers on Earth.
For decades, researchers adjusted rover weight to mimic lower gravity on the Moon or <span class="glossaryLink" aria-describedby="tt" data-cmtooltip="
” data-gt-translate-attributes=”[{"attribute":"data-cmtooltip", "format":"html"}]” tabindex=”0″ role=”link”>Mars, but they overlooked how Earth’s gravity affects the sand itself. In reality, lunar soil is much looser and less supportive than Earth sand, making rovers more prone to getting stuck.
Earth-Based Testing Falls Short
When a multimillion-dollar spacecraft becomes bogged down in soft sand or gravel, as happened to NASA’s Mars rover Spirit in 2009, the task of rescuing it falls to engineers back on Earth. Acting like a remote-controlled tow crew, they send a sequence of carefully planned commands to move its wheels or reverse its path, a slow and delicate process aimed at freeing the vehicle so it can resume its mission.
Spirit never broke free, but future missions might avoid similar setbacks if rover designs are tested more effectively on Earth before launch.
Mechanical engineers at the University of Wisconsin–Madison have used computer simulations to reveal a flaw in current Earth-based testing methods. This oversight often results in overly optimistic predictions about how rovers will handle the actual terrain of the Moon or Mars. A key part of mission planning is understanding how a rover will move across extraterrestrial surfaces in low gravity so it can steer clear of hazards like soft soil or rock fields.
Misleading Moon Rover Tests
On the Moon, gravity is only one-sixth as strong as on Earth. For decades, engineers have accounted for this by building test models that weigh one-sixth as much as the real rover, then driving them across desert sand to gauge performance.
However, this long-standing approach misses an important factor: how Earth’s stronger gravity affects the sand itself.
Using advanced simulations, UW–Madison professor Dan Negrut and his colleagues discovered that Earth’s gravity compresses sand more than the weaker gravity of Mars or the Moon. On Earth, this makes the surface firmer and more supportive, reducing the chance it will shift under a rover’s wheels. On the Moon, however, the soil is looser and more prone to shifting, meaning rovers have less traction and a greater risk of getting stuck.
Simple Insight, Big Impact
“In retrospect, the idea is simple: We need to consider not only the gravitational pull on the rover but also the effect of gravity on the sand to get a better picture of how the rover will perform on the moon,” Negrut says. “Our findings underscore the value of using physics-based simulation to analyze rover mobility on granular soil.”
The team recently detailed its findings in the Journal of Field Robotics

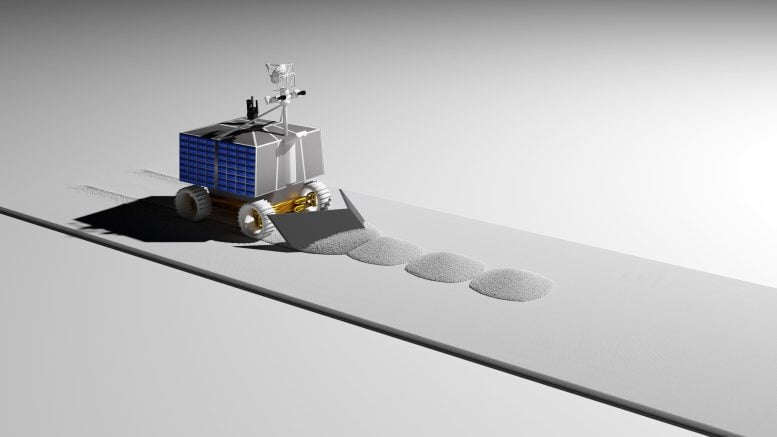
Simulating VIPER’s Lunar Mission
The researchers’ discovery resulted from their work on a NASA-funded project to simulate the VIPER rover, which had been planned for a lunar mission. The team leveraged Project Chrono, an open-source physics simulation engine developed at UW–Madison in collaboration with scientists from Italy. This software allows researchers to quickly and accurately model complex mechanical systems — like full-size rovers operating on “squishy” sand or soil surfaces.
While simulating the VIPER rover, they noticed discrepancies between the Earth-based test results and their simulations of the rover’s mobility on the moon. Digging deeper with Chrono simulations revealed the testing flaw.
Chrono’s Real-World Power
The benefits of this research also extend well beyond NASA and space travel. For applications on Earth, Chrono has been used by hundreds of organizations to better understand complex mechanical systems — from precision mechanical watches to U.S. Army trucks and tanks operating in off-road conditions.
“It’s rewarding that our research is highly relevant in helping to solve many real-world engineering challenges,” Negrut says. “I’m proud of what we’ve accomplished. It’s very difficult as a university lab to put out industrial-strength software that is used by NASA.”
Chrono is free and publicly available for unfettered use worldwide, but the UW–Madison team puts in significant ongoing work to develop and maintain the software and provide user support.
Competing With the Tech Giants
“It’s very unusual in academia to produce a software product at this level,” Negrut says. “There are certain types of applications relevant to NASA and planetary exploration where our simulator can solve problems that no other tool can solve, including simulators from huge tech companies, and that’s exciting.”
Since Chrono is open source, Negrut and his team are focused on continually innovating and enhancing the software to stay relevant.
“All our ideas are in the public domain and the competition can adopt them quickly, which is drives us to keep moving forward,” he says. “We have been fortunate over the last decade to receive support from the National Science Foundation, U.S. Army Research Office and NASA. This funding has really made a difference, since we do not charge anyone for the use of our software.”
Reference: “A Study Demonstrating That Using Gravitational Offset to Prepare Extraterrestrial Mobility Missions Is Misleading” by Wei Hu, Pei Li, Arno Rogg, Alexander Schepelmann, Samuel Chandler, Ken Kamrin and Dan Negrut, 27 May 2025, Journal of Field Robotics.
DOI: 10.1002/rob.22597
This work was supported by NASA STTR (80NSSC20C0252), the National Science Foundation (OAC2209791) and the U.S. Army Research Office, (W911NF1910431 and W911NF1810476).
Never miss a breakthrough: Join the SciTechDaily newsletter.